Neural surface reconstruction methods typically treat camera poses as fixed values, assuming perfect accuracy from Structure-from-Motion (SfM) systems. This assumption breaks down with imperfect pose estimates, leading to distorted or incomplete reconstructions. We present PCM-NeRF, a probabilistic framework that augments neural surface reconstruction with per-camera learnable uncertainty, built directly on SG-NeRF. Rather than treating all cameras equally throughout optimization, we represent each pose as a distribution with a learnable mean and variance, initialized from SfM correspondence quality. An uncertainty regularization loss couples the learned variance to view confidence — derived from both geometric correspondences and rendering quality — and the resulting uncertainty directly modulates the effective pose learning rate: uncertain cameras receive damped gradient updates, preventing poorly initialized views from corrupting the reconstruction. Experiments on challenging scenes with severe pose outliers demonstrate that PCM-NeRF consistently outperforms state-of-the-art methods in both Chamfer Distance and F-Score, particularly for geometrically complex structures, without requiring foreground masks.
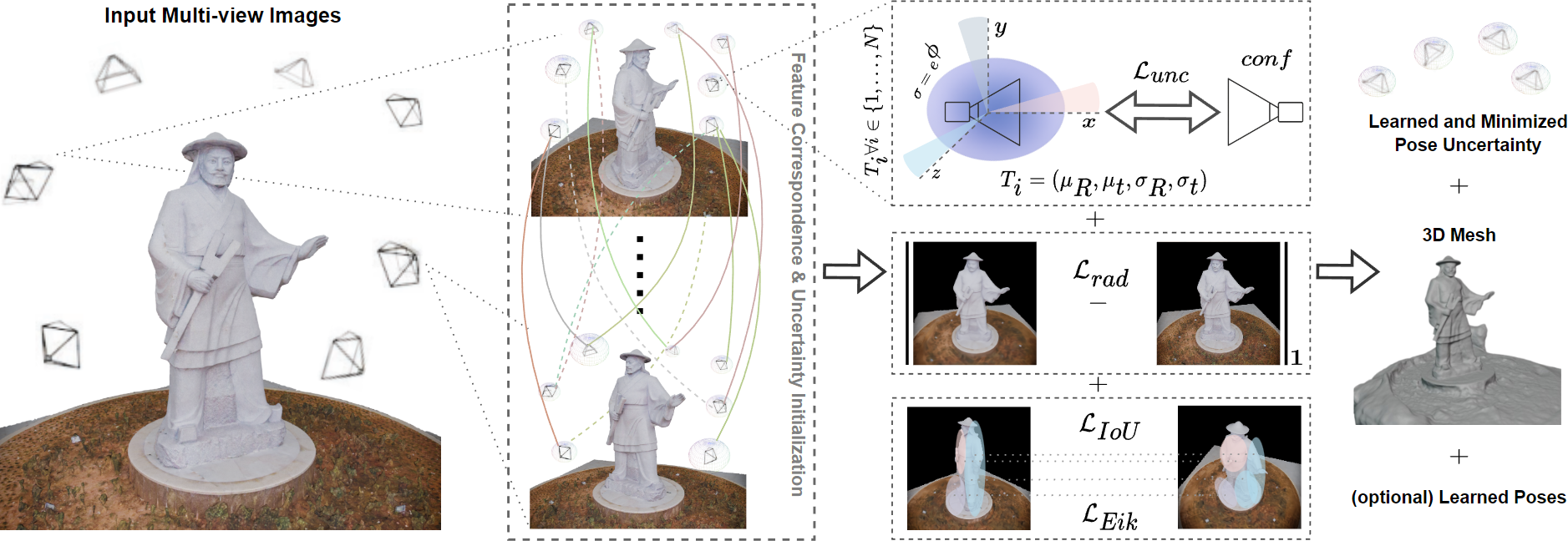
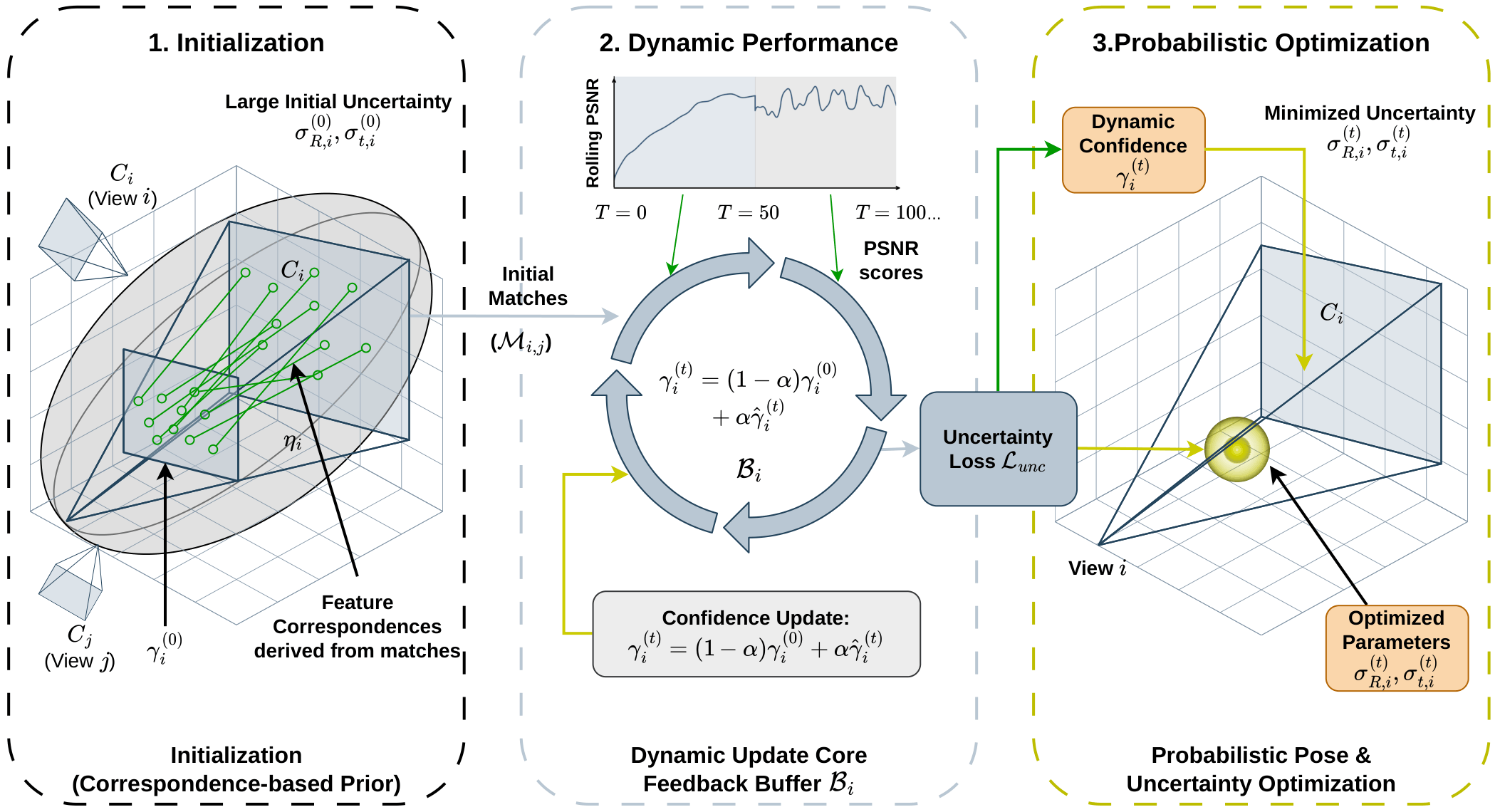
PCM-NeRF builds directly on SG-NeRF, extending gradient-based pose refinement with a lightweight probabilistic pose representation. Each camera pose Pi is modeled as a distribution in SE(3) with learnable mean μi = (ri, ti) and diagonal covariance Σi = diag(σ²r,i, σ²t,i), parameterized in log-space for numerical stability. All rendering uses the mean pose directly — adding no inference-time overhead — while the variance parameters are optimized through the uncertainty regularization loss.
View reliability is estimated from SfM correspondence density and a rolling buffer of per-camera PSNR scores, blended as γi(t) = (1−α)γi(0) + α·γ̂i(t) with α = 0.7. The uncertainty regularization loss encourages σ̄i ≈ (1−γi), and the learned uncertainty modulates the effective pose learning rate: ηipose = η₀ / (1 + σ̄i · κ), where κ = 5.0. Geometric consistency is enforced via the volumetric IoU loss over Mixture-of-Gaussian density distributions along matched rays, inherited from SG-NeRF.
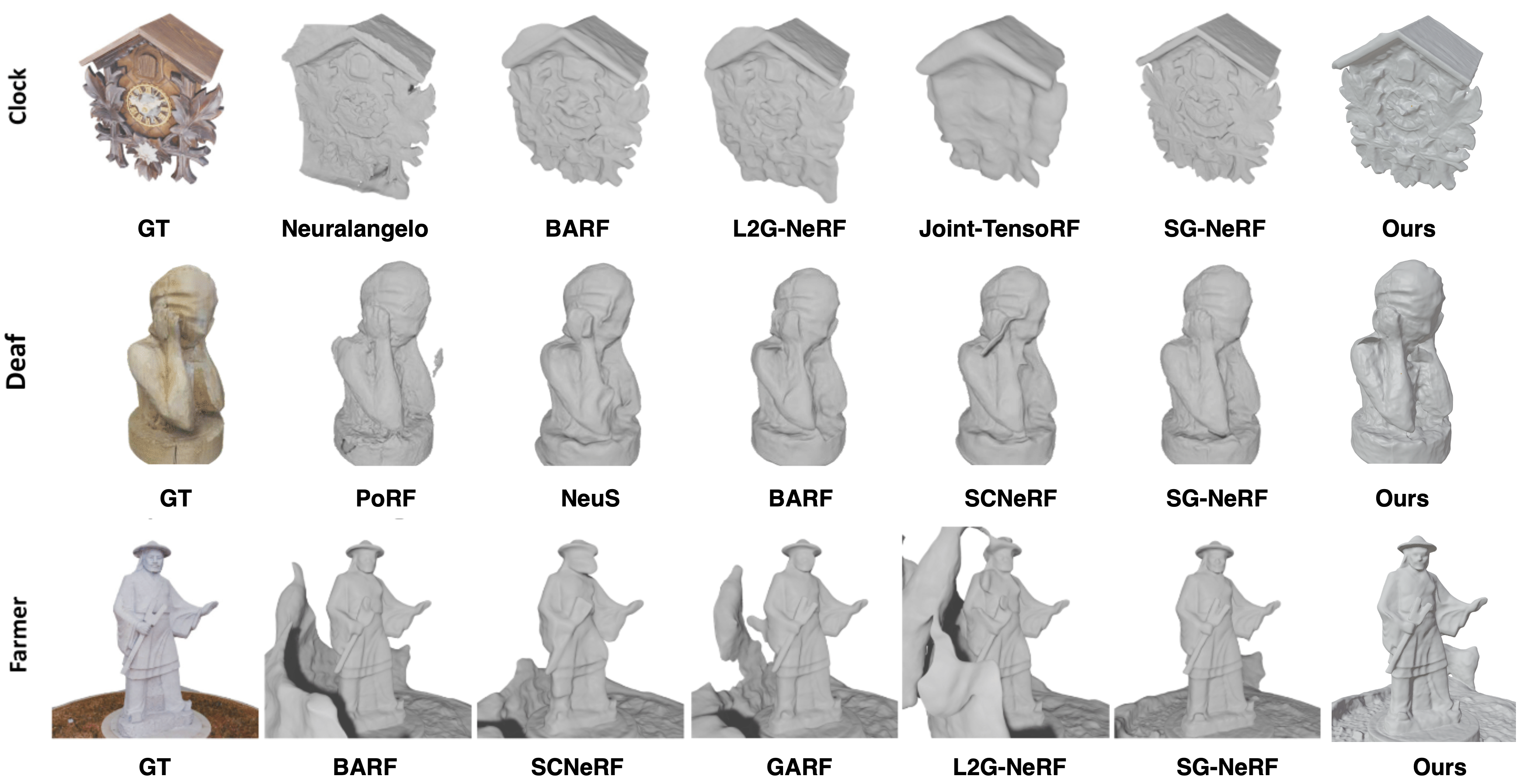
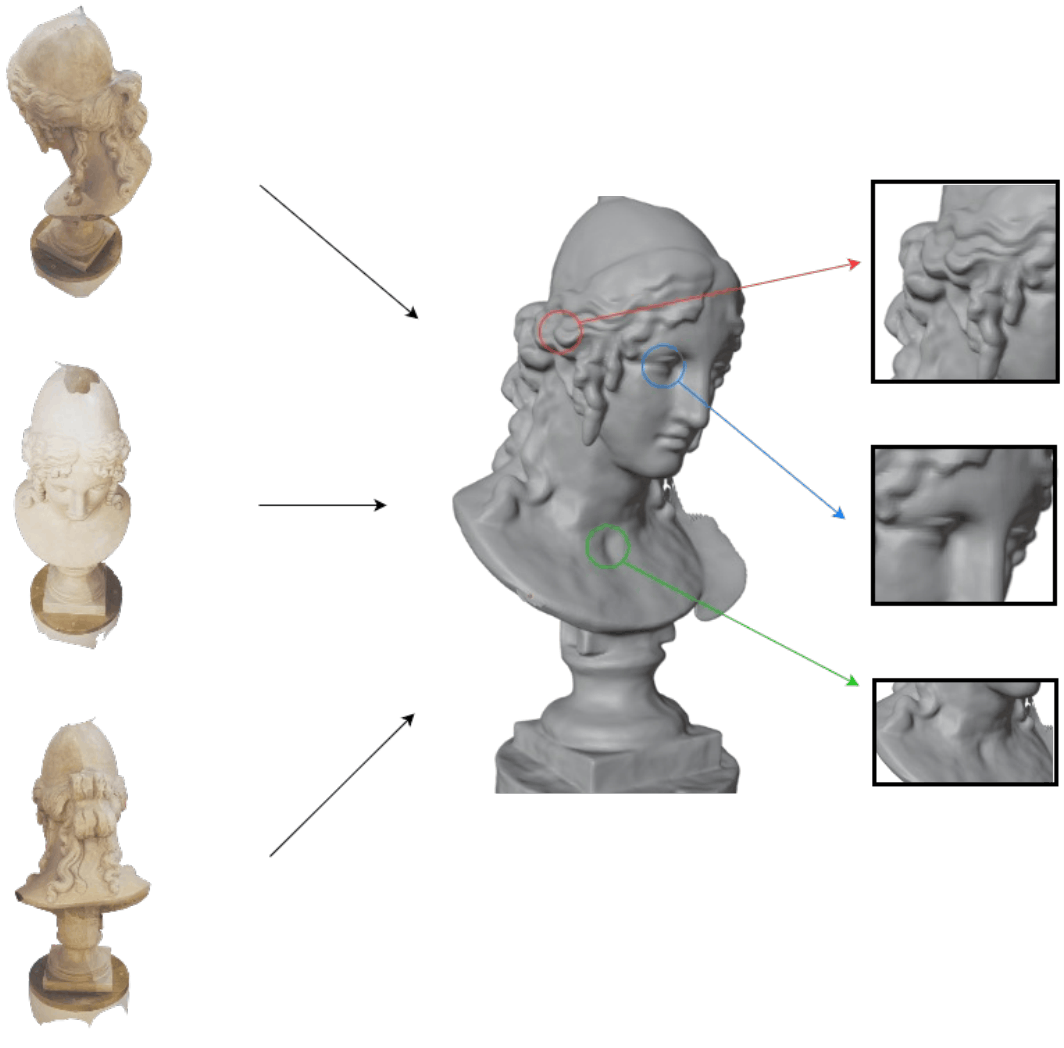
Qualitative comparison across Clock, Deaf, and Farmer scenes. PCM-NeRF recovers finer geometric detail compared to all baselines, particularly in regions where outlier pose initialization corrupts reconstruction.

Effect of IoU weight (λIoU) and uncertainty weight (λunc) on Chamfer Distance and F-Score. Best results are achieved at λIoU = 0.2 and λunc = 0.05.
| Prob. Uncertainty | Feature Corr. | CD ↓ | F-Score ↑ |
|---|---|---|---|
| ✗ | ✗ | 1.18 | 0.72 |
| ✓ | ✗ | 1.33 | 0.68 |
| ✗ | ✓ | 0.46 | 0.85 |
| ✓ | ✓ | 0.32 | 0.93 |
| Method | Baby | Bear | Bell | Clock | Deaf | Farmer | Pavilion | Sculpture | Mean CD ↓ | Mean F ↑ |
|---|---|---|---|---|---|---|---|---|---|---|
| NeuS | 0.69 | 0.31 | 3.33 | 1.16 | 0.55 | 2.49 | 0.29 | 0.66 | 1.19 | 0.73 |
| Neuralangelo | 0.70 | 0.65 | — | 0.38 | 0.59 | 4.89 | 1.95 | 0.31 | — | — |
| BARF | 1.08 | 0.28 | 3.31 | 0.19 | 0.46 | 2.13 | 0.38 | 0.57 | 1.05 | 0.73 |
| SCNeRF | 1.19 | 0.27 | 3.74 | 1.33 | 0.46 | 1.45 | 0.23 | 0.81 | 1.19 | 0.66 |
| GARF | 2.04 | 2.25 | 3.09 | 0.50 | 0.59 | 1.58 | 0.96 | 0.57 | 1.45 | 0.70 |
| L2G-NeRF | 1.15 | 0.29 | 1.26 | 0.24 | 0.40 | 2.18 | 0.46 | 0.37 | 0.79 | 0.76 |
| Joint-TensoRF | 3.11 | 1.22 | 2.49 | 0.36 | 0.36 | 2.51 | 1.35 | 0.70 | 1.51 | 0.59 |
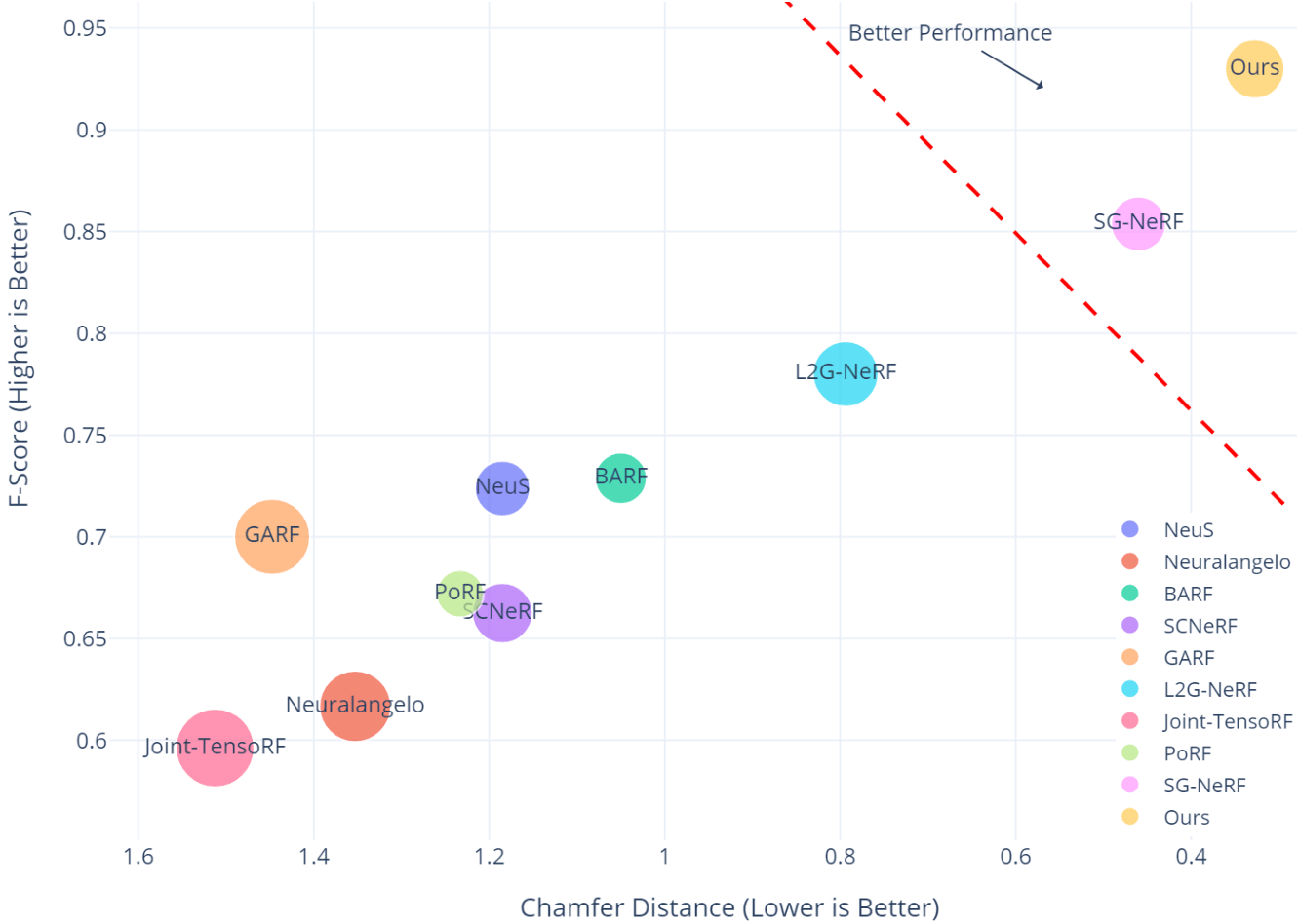
| SG-NeRF | 0.56 | 0.25 | 0.98 | 0.15 | 0.45 | 0.87 | 0.20 | 0.22 | 0.46 | 0.85 |
| Ours (PCM-NeRF) | 0.25 | 0.24 | 0.51 | 0.16 | 0.23 | 0.79 | 0.24 | 0.20 | 0.33 | 0.93 |
Chamfer Distance ↓ per scene. Bold = best per column. PCM-NeRF achieves the lowest CD on 6 of 8 scenes.
@inproceedings{venkatraman2026pcm,
title={PCM-NeRF: Probabilistic Camera Modeling for Neural Radiance Fields under Pose Uncertainty},
author={Venkatraman, Shravan and Madavan, Rakesh Raj and Venkatesh, Pavan Kumar Sathya},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={4719--4728},
year={2026}
}